产品:26
产品:26
 联系我们
联系我们

ABB码垛机器人的13大调试步骤(1)——码垛机器人
一.安装机器人在安装机器人之前,首先要检查设备是否缺件,用眼睛观察机器人是否完好无损。然后安装控制柜,用叉车或吊车吊装机器人本体。***后连接机器人本体与控制柜,机器人与控制柜的连接主要是电动机动力电缆与转数计数器电缆、用户电缆的连接。
二.设置语言
***次通电开机时,默认的语言是英语,需要更改为汉语,方便操作。
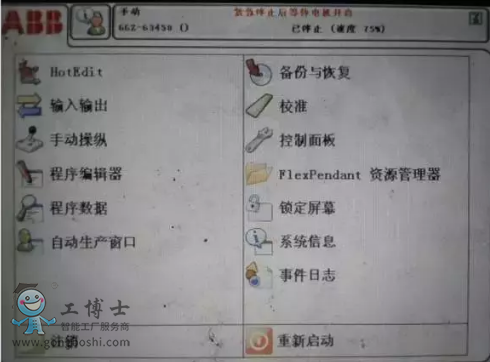
1.点击左上角”ABB”图标
2.点击“Control Panel”
3.点击“language”
4.选择“Chinese”,点击“OK”
5.选择“Yes“后等待机器人重启,语言设置就完成了
三.备份与恢复
定期对机器人进行备份,是保证机器人正常工作的良好习惯。备份文件可以放在机器人内部的存储器上,也可以备份到U盘上。
备份文件包含运行程序和系统配置参数等内容。当机器人系统出错,可以通过备份文件快速的恢复备份前的状态。平时在程序更改之前,一定要做好备份。需要注意的是,备份恢复数据是 具有***性的,不能将一台机器人的备份数据恢复到另一个机器人上。
四.校准
ABB机器人每个关节轴都有一个机械原点的位置。遇到下列情况时,需要对机械原点的位置进行转数计数器的更新操作:
1.更新伺服电动机转数计数器电池后
2.当转数计数器发生故障,修复后
3.转数计数器与测量板之间断开过以后
4.断电后,机器人关节轴发生了移动
5.当系统警报提示“10036转数计数器未更新”
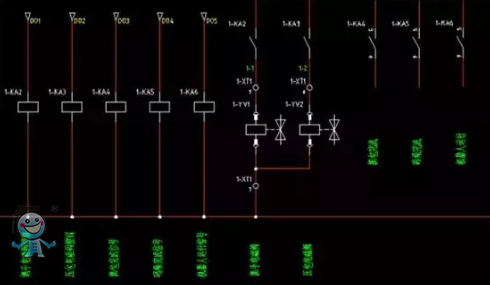
五.系统I/O配置及接线
以某抓手接线电气原理图来说明。
机器人信号输入部分原理图,其中704位24V+,703位24V-,输入信号由夹爪开始位、夹爪结束位、压板结束位、抓包辊道准备好、托盘准备好,一共五个。
前三个为气缸磁性开关检测信号,后两个为配套PLC传送给机器人大包和托盘准备好的信号,为了实现电气隔离,需要将PLC给机器人的电平信号转化为机器人自身的电平,需要通过继电器来实现。